专为机器人应用设计
东元机器关节模块系统是一款高集成、高可靠性的精密动力模块,专为机器人应用而设计。产品整合无刷电机、行星减速机、编码器与传感器等关键元件,具备强劲扭矩输出、精准位置控制与优异的环境适应能力,适用于机械手臂、四足机器人、仿人型机器人等多样化应用场景。
模块采用 All-in-One 结构设计,简化组装布线,通过标准化接口实现快速整合,缩短产品开发周期。内建多组传感器(温度、位置、力矩等),可即时监控运行状态并进行闭环调整,确保运动过程中的安全性与稳定性。搭配高速 EtherCAT 通讯,具备低延迟与高响应频率,满足协作控制与多轴协调等需求。
外壳采用高强度轻量合金,通过 IP66/IP67 工业级防护认证,适用于严苛环境条件。高集成、高精度与高可靠性的设计,使该模块成为开发高性能机器人与移动设备的理想选择。
应用案例

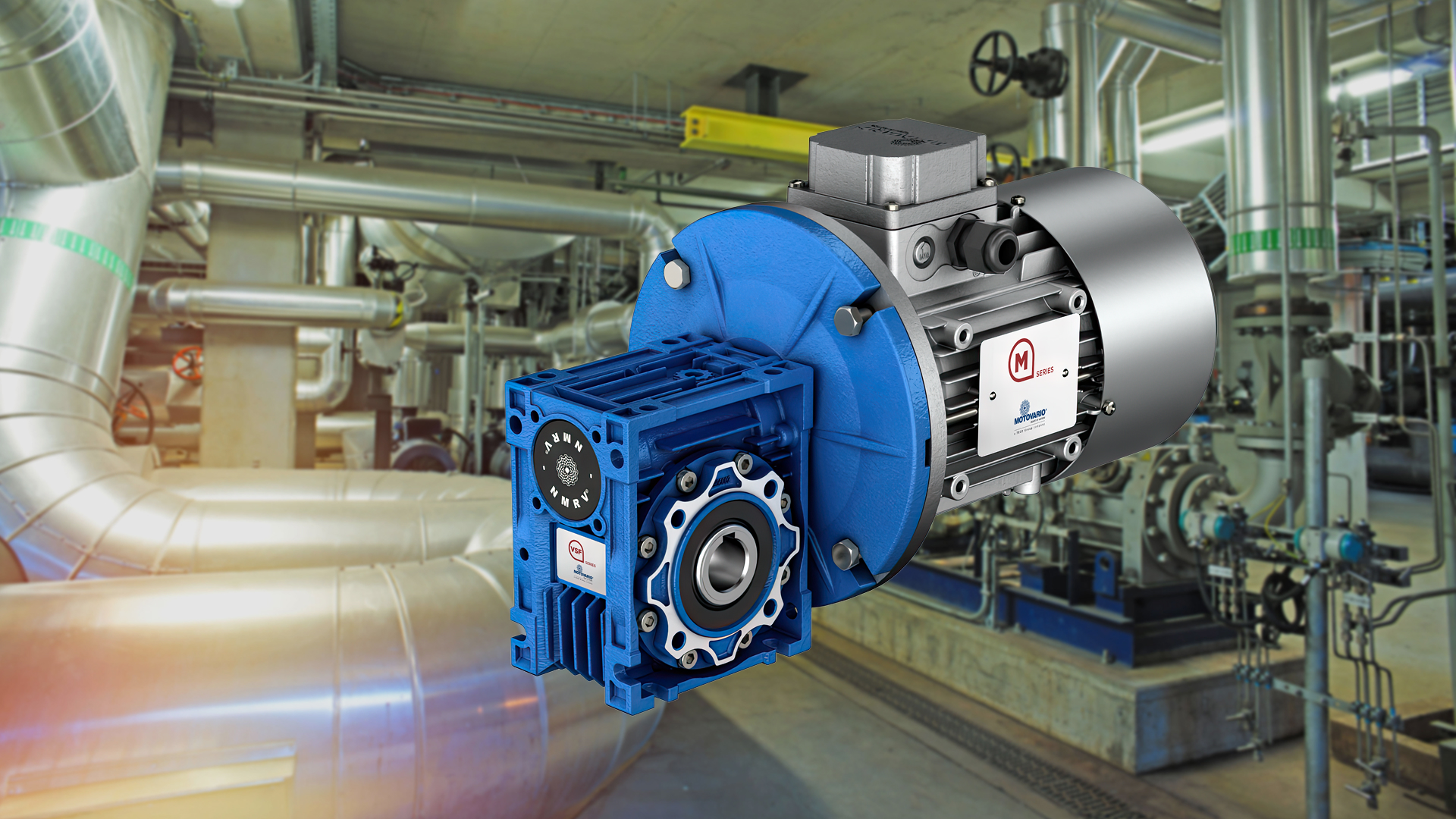
机械手臂
精密工业自动化应用,如焊接、装配、分拣等
仿人/协作机器人

多足机器人
联系我们
钟文科 处长
- miller.chung@teco.com.tw
- 02-6615-9111 #1666
江孟修 经理
- chris.chiang@teco.com.tw
- 03-4525031 # 2130